一、内核全局描述符表
前面在内核加载器中实现了全局描述符,这里我们把全局描述符写到内核中去,这样管理起来更加的方便。首先定义GDT、段选择子、描述符指针结构体。然后定义全局描述符表初始化函数。
descriptor_t gdt[GDT_SIZE]; // 内核全局描述符表, GDT_SIZE设置128
pointer_t gdt_ptr; // 内核全局描述符表指针
// 初始化内核全局描述符表
void gdt_init()
{
DEBUGK("init gdt!!!\n");
asm volatile("sgdt gdt_ptr"); // 将内核加载器中实现的GDT保存到指针里面
memcpy(&gdt, (void *)gdt_ptr.base, gdt_ptr.limit + 1); // 将内核加载器的描述符表拷贝到内核的 gdt 里面
gdt_ptr.base = (u32)&gdt;
gdt_ptr.limit = sizeof(gdt) - 1;
asm volatile("lgdt gdt_ptr\n"); // 加载内核的GDT.
}
执行完唯一的变化是全局描述符由3个变成了128个。前边3个还是和原来内核加载器的gdt一样,后边新的125个size都是0。
二、任务及上下文
任务就是一个进程或线程,也可以理解为一个执行流。它需要有一个程序入口地址,这可以理解我们在高级语言编程中的线程入口函数。每个进程都有自己的堆栈和寄存器信息。因此进程切换时要保存寄存器信息。
2.1、ABI调用约定
ABI调用(Application Binary Interface)规定了函数调用约定,寄存器的使用规则。哪些寄存器需要保存等信息。Linux系统使用的是System V ABI。需要实现方保存的寄存器有ebx、esi、 edi、 ebp、 esp, 调用完成后这些寄存器的值不变。需要调用方保存的寄存器有eax, ecx, edx。例如eax需要存返回值,是有可能发生改变的。
2.1、任务内存分布
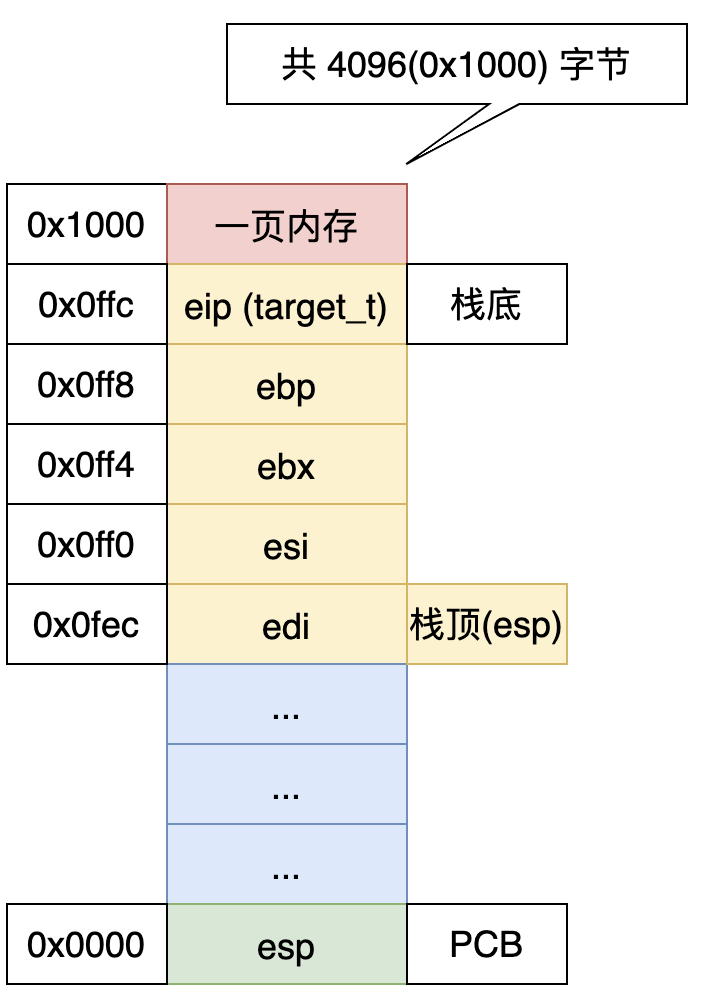
在80386CPU中,内存按照4K大小进行分页, 每一页开始的内存地址最低三位都是0。任务是存储在内存中的,这里给每个进程分配一页大小的内存。如图所示为一页内存中进程的信息:
2.2、进程上下切换实现
我们首先来定义进程相关的结构
typedef u32 target_t(); // 定义进程的入口地址函数
typedef struct task_t
{
u32 *stack; // 内核栈,每个任务自己的栈分配一页内存
} task_t;
typedef struct task_frame_t // ABI约定要保存的寄存器,在进行切换前要保存。
{
u32 edi;
u32 esi;
u32 ebx;
u32 ebp;
void (*eip)(void);
} task_frame_t;
void task_init(); // 任务初始化函数
接下来我们来实现一个在屏幕上打印A和B的进程,轮流调度这两个进程,实现轮流打印A和B的功能。代码实现:
#define PAGE_SIZE 0x1000 // 定义一页的大小为4K
//定义进程的内存位置x1000,这个内存位置我们放了内核加载器,当然现在已经进入了内核,内核加载器已经没用了
task_t *a = (task_t *)0x1000;
task_t *b = (task_t *)0x2000;
extern void task_switch(task_t *next);
task_t *running_task() // 获取当前运行的进程
{
asm volatile(
"movl %esp, %eax\n" // 获取当前进程的esp,即栈顶
"andl $0xfffff000, %eax\n"); // 获取当前进程内存页开始的位置,即得到当前进程内存所在页
}
void schedule()
{
task_t *current = running_task();
task_t *next = current == a ? b : a; // 如果当前是a就换b,否则就换a。交替执行
task_switch(next);
}
u32 thread_a()
{
while (true)
{
printk("A");
schedule();
}
}
u32 thread_b()
{
while (true)
{
printk("B");
schedule();
}
}
static void task_create(task_t *task, target_t target)
{
u32 stack = (u32)task + PAGE_SIZE; // 设置进程所在页的最高位为栈顶
stack -= sizeof(task_frame_t); // 内存的最高位存储task_frame_t结构
task_frame_t *frame = (task_frame_t *)stack;
frame->ebx = 0x11111111; // 这里我们用不到这些个寄存器,随便存一些值
frame->esi = 0x22222222;
frame->edi = 0x33333333;
frame->ebp = 0x44444444;
frame->eip = (void *)target; // eip指向程序的入口位置
task->stack = (u32 *)stack; // 将task结构的栈指向这里
}
void task_init()
{
task_create(a, thread_a); // 创建两个进程
task_create(b, thread_b);
schedule();
}
从这个代码我们可以看到,创建两个任务,分配到内存0x1000和0x2000的位置。然后交替调度两个任务。这里重点是task_switch函数,这个函数用汇编实现,代码如下:
task_switch:
push ebp ; 保存栈帧
mov ebp, esp
push ebx ; 保存ABI约定的三个寄存器,保存了当前任务的寄存器
push esi
push edi
mov eax, esp;
and eax, 0xfffff000 ; 获取当前的任务信息
mov [eax], esp ; 保存当前线程的栈顶
mov eax, [ebp + 8] ; 参数传进来的next,即下一个进程的内存地址
mov esp, [eax] ; 恢复next线程的栈顶, 注意这里esp已经指向下一个任务的栈顶了
pop edi ; 恢复下一个任务的寄存器
pop esi
pop ebx
pop ebp
ret
三、调试进程切换
现在我们启动调试,看下0x1000处的内存,如下所示:
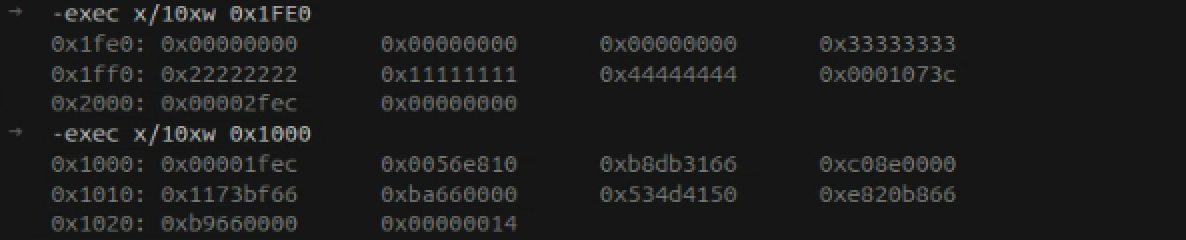 如图可以看到,在0x1000这一页内存位置,最高位存储是我们代码中设置的寄存器值,低位是PCB信息,PCB的最低位也是保存的esp。和我们前边给的图一一对应。
如图可以看到,在0x1000这一页内存位置,最高位存储是我们代码中设置的寄存器值,低位是PCB信息,PCB的最低位也是保存的esp。和我们前边给的图一一对应。
这里我们重点关注一下 eip 寄存器,它被设置在栈底的位置,task_switch函数在弹出保存的栈之后,最后一个就是进程的函数入口地址,ret指令会弹出这个地址给eip寄存器,CPU就会继续去eip指向的地址取指令并运行,这样就实现了进程切换。
「真诚赞赏,手留余香」
 WangFuJie Blog
WangFuJie Blog
真诚赞赏,手留余香
使用微信扫描二维码完成支付
