一、磁盘同步PIO
PIO(Programmed Input/Output) 编程输入输出,PIO 模式使用了大量的 CPU 资源,因为磁盘和 CPU 之间传输的每个字节的数据都必须通过 CPU 的 IO 端口总线(而不是内存)传送。在某些 CPU 上,PIO 模式仍然可以实现每秒 16 MB 的实际传输速度,但是机器上的其他进程将得不到任何 CPU 时间片。
1.1、磁盘同步PIO实现
在CPU从硬盘加载bootloader和内核时,我们使用汇编语言实现过硬盘的读写就是通过同步PIO,这里我们通过C语言在内核中来实现。
#define SECTOR_SIZE 512 // 扇区大小
#define IDE_CTRL_NR 2 // 控制器数量,固定为 2
#define IDE_DISK_NR 2 // 每个控制器可挂磁盘数量,固定为 2
typedef struct ide_disk_t // IDE 磁盘
{
char name[8]; // 磁盘名称
struct ide_ctrl_t *ctrl; // 控制器指针
u8 selector; // 磁盘选择
bool master; // 主盘
u32 total_lba; // 可用扇区数量
u32 cylinders; // 柱面数
u32 heads; // 磁头数
u32 sectors; // 扇区数
} ide_disk_t;
typedef struct ide_ctrl_t // IDE 控制器
{
char name[8]; // 控制器名称
lock_t lock; // 控制器锁
u16 iobase; // IO 寄存器基址
ide_disk_t disks[IDE_DISK_NR]; // 磁盘
ide_disk_t *active; // 当前选择的磁盘
u8 control; // 控制字节
struct task_t *waiter; // 等待控制器的进程
} ide_ctrl_t;
IDE(Integrated Drive Electronics) 是一种老式硬盘接口协议,也叫 ATA。传统 PC 架构中,一个系统默认最多支持 两个 IDE 控制器(Primary 和 Secondary),每个控制器可以挂接 最多 2 块磁盘(一块主盘 master,一块从盘 slave)。接下来就是控制器的初始化和磁盘的读写,我们这里不再贴这部分代码,其中的原理通过汇编实现磁盘读写时已经展示过。
同步PIO在读写硬盘过程中,发起读写请求后,需要原地等待磁盘数据准备完毕,因此性能比较低。
二、磁盘异步PIO
同步状态监测会消耗大量CPU资源,所以可以使用异步方式等待硬盘驱动器。发完读写命令后进程可以进入阻塞态,当驱动器完成一个扇区的操作 (读/写) 时,会发送中断,可以在中断中恢复进程到就绪态,继续执行。
int ide_pio_read(ide_disk_t *disk, void *buf, u8 count, idx_t lba)
{
assert(count > 0);
assert(!get_interrupt_state()); // 异步方式,调用该函数时不许中断
ide_ctrl_t *ctrl = disk->ctrl;
lock_acquire(&ctrl->lock);
ide_select_drive(disk); // 选择磁盘
ide_busy_wait(ctrl, IDE_SR_DRDY); // 等待就绪
ide_select_sector(disk, lba, count); // 选择扇区
outb(ctrl->iobase + IDE_COMMAND, IDE_CMD_READ); // 发送读命令
for (size_t i = 0; i < count; i++)
{
task_t *task = running_task();
if (task->state == TASK_RUNNING) // 系统初始化时,不能使用异步方式
{
ctrl->waiter = task; // 阻塞自己等待中断的到来,等待磁盘准备数据
task_block(task, NULL, TASK_BLOCKED);
}
ide_busy_wait(ctrl, IDE_SR_DRQ);
u32 offset = ((u32)buf + i * SECTOR_SIZE);
ide_pio_read_sector(disk, (u16 *)offset);
}
lock_release(&ctrl->lock);
return 0;
}
void ide_handler(int vector)
{
send_eoi(vector); // 向中断控制器发送中断处理结束信号
ide_ctrl_t *ctrl = &controllers[vector - IRQ_HARDDISK - 0x20]; // 得到中断向量对应的控制器
u8 state = inb(ctrl->iobase + IDE_STATUS); // 读取常规状态寄存器,表示中断处理结束
LOGK("harddisk interrupt vector %d state 0x%x\n", vector, state);
if (ctrl->waiter)
{
// 如果有进程阻塞,则取消阻塞
task_unblock(ctrl->waiter);
ctrl->waiter = NULL;
}
}
如上所示,在读取硬盘时,发起读请求后当前进程主动进入阻塞态。当数据准备完成时,就会产生中断,中断函数为ide_handler。我们这里实现的是每读写一个扇区就产生一次中断,当然还可以实现读写多块,读写多个扇区产生一次中断,这比较复杂我们的系统不做实现。
注意这里在异步读写硬盘时不允许中断,因为有可能发起读请求后,数据很快准备完成了,就产生了中断进行中断处理,但此时trl->waiter为NULL,因此本次中断没起作用。然后我们的读硬盘继续向下执行自动主动阻塞,但是不会再有中断到来了,因此可能永远阻塞在这里。
三、识别硬盘
PC最多支持四个IDE硬盘,因此我们需要识别哪些挂了硬盘。目前所有的 BIOS 都标准化了 IDENTIFY 命令的使用,以检测所有类型的 ATA 总线设备的存在 PATA, PATAPI, SATAPI, SATA。
static u32 ide_identify(ide_disk_t *disk, u16 *buf)
{
LOGK("identifing disk %s...\n", disk->name);
lock_acquire(&disk->ctrl->lock); // 加锁
ide_select_drive(disk); // 选择磁盘
outb(disk->ctrl->iobase + IDE_COMMAND, IDE_CMD_IDENTIFY); // 向磁盘发生识别命令0xEC,此时磁盘回准备512字节的磁盘信息数据
ide_busy_wait(disk->ctrl, IDE_SR_NULL);
ide_params_t *params = (ide_params_t *)buf; // 磁盘信息的数据结构,我们一般只关注total lba
ide_pio_read_sector(disk, buf); // 读取一个扇区到buf中
LOGK("disk %s total lba %d\n", disk->name, params->total_lba);
u32 ret = EOF;
if (params->total_lba == 0)
{
goto rollback;
}
ide_swap_pairs(params->serial, sizeof(params->serial)); // 以下为一些打印信息
LOGK("disk %s serial number %s\n", disk->name, params->serial);
ide_swap_pairs(params->firmware, sizeof(params->firmware));
LOGK("disk %s firmware version %s\n", disk->name, params->firmware);
ide_swap_pairs(params->model, sizeof(params->model));
LOGK("disk %s model number %s\n", disk->name, params->model);
disk->total_lba = params->total_lba;
disk->cylinders = params->cylinders;
disk->heads = params->heads;
disk->sectors = params->sectors;
ret = 0;
rollback:
lock_release(&disk->ctrl->lock);
return ret;
}
如上为识别硬盘的代码,通过IDENTIFY命令,也就是发送指定指令。就会获取到是否有硬盘以及硬盘的大小等信息。BIOS通过IDENTIFY来识别硬盘。这里会分别去识别4块硬盘是否存在,如果totle_lba为0,则认为硬盘不存在。效果如下:

四、硬盘分区
为了实现多个操作系统共享硬盘资源,硬盘可以在逻辑上分为 4 个主分区。每个分区之间的扇区号是邻接的。分区表由 4 个表项组成,每个表项由 16 字节组成,对应一个分区的信息,存放有分区的大小和起止的柱面号、磁道号和扇区号。磁盘分区存储在主引导扇区的64个字节中,即 0 柱面 0 磁头第 1 个扇区的 0x1BE ~ 0x1FD 处。
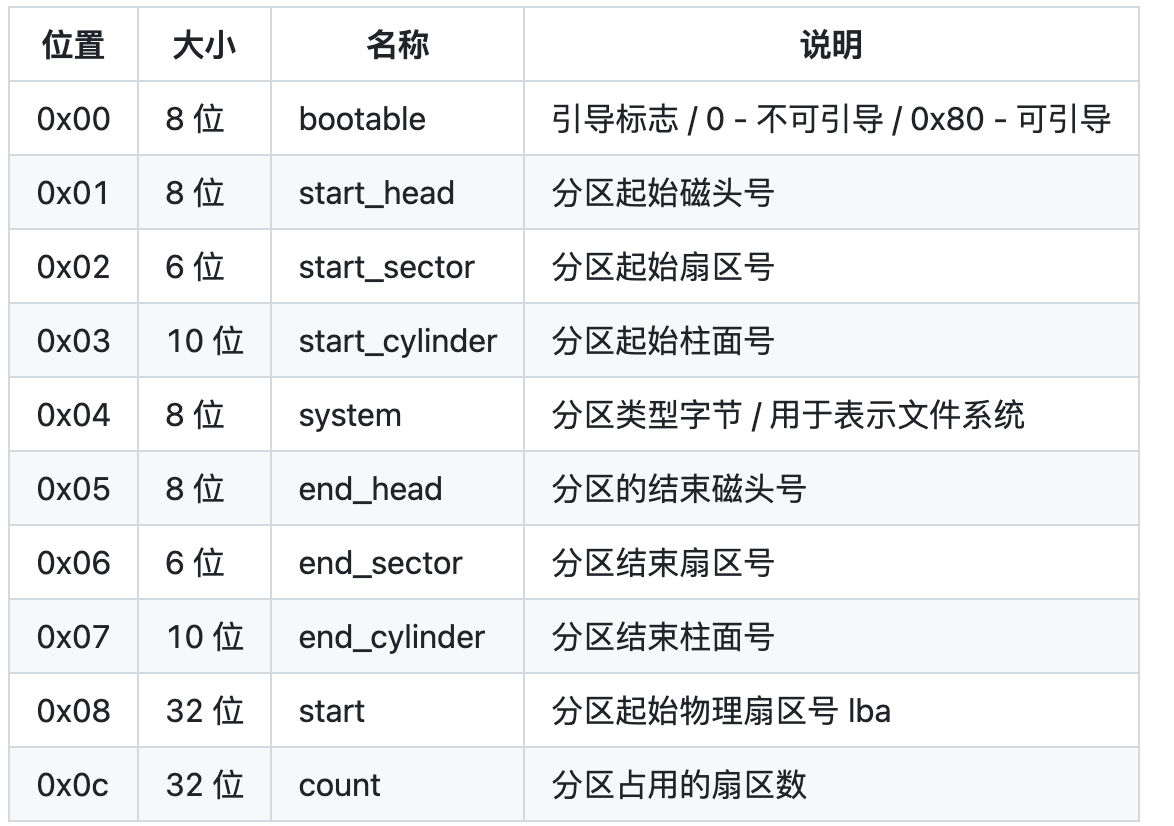 如图为每个主分区的存储信息,主要关注分区类型字节、分区起始位置和分区扇区数即可
如图为每个主分区的存储信息,主要关注分区类型字节、分区起始位置和分区扇区数即可
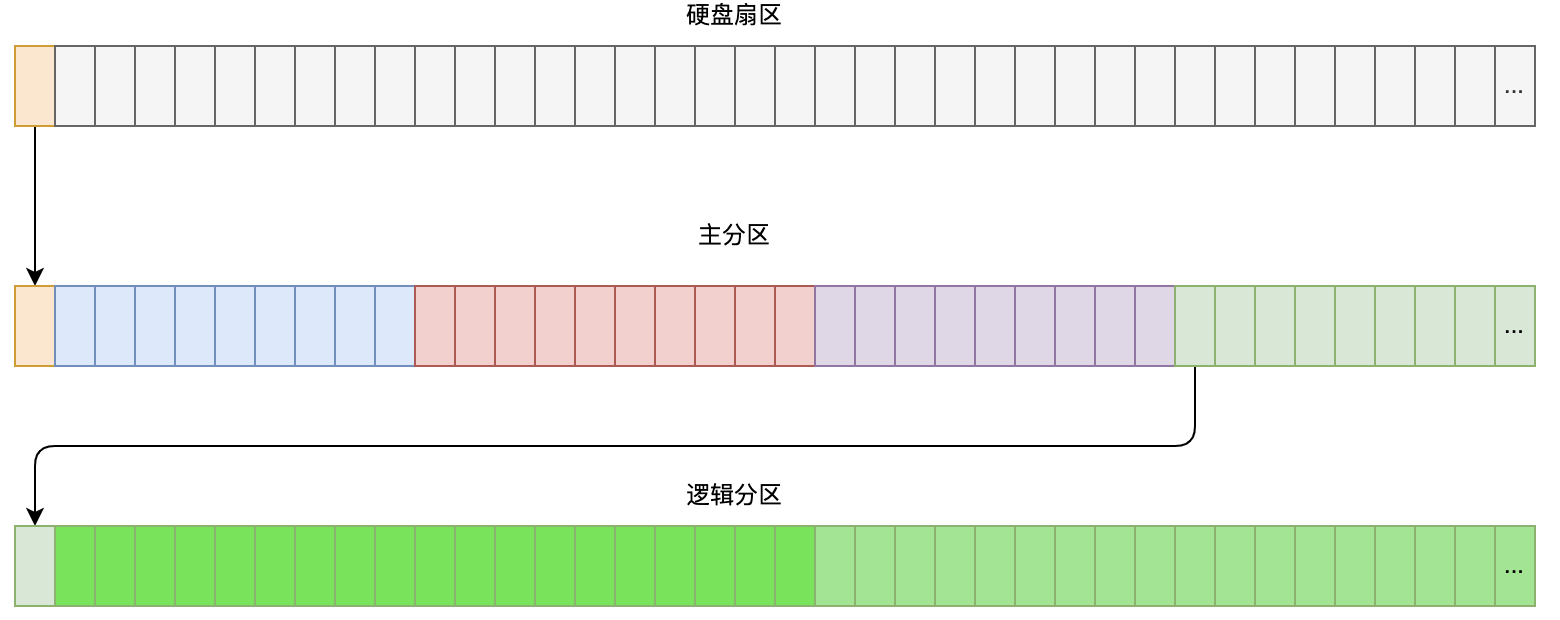
4.1、扩展分区
扩展分区是一种可以多加 4 个分区的方式。如果分区表中的 SystemID 字段的值位 0x5,表示该分区为扩展分区。
可以将扩展分区的所有扇区组合起来认为是一个新的磁盘,然后再对其进行分区,这种逻辑有点套娃,所以如果磁盘空间足够大,理论上可以分出无数个分区。
4.2、创建分区
可以通过 fdisk 命令对磁盘进行分区,这样就可以对我们的master.img进行分区操作了。以下是分区相关的几条命令:
sfdisk -d /dev/... > master.sfdisk # 然后可以将分好区的分区信息备份
sfdisk /dev/... < master.sfdisk # 有分区信息可以直接对磁盘进行分区
sudo losetup /dev/loop0 --partscan master.img # 可以将磁盘挂载到系统
sudo losetup -d /dev/loop0 # 取消挂载
做完分区后,就可以在我们的操作系统中来读取分区了。
#define IDE_PART_NR 4 // 每个磁盘分区数量,只支持主分区,总共 4 个
typedef struct part_entry_t // 这是主引导扇区内的16个字节信息
{
u8 bootable; // 引导标志
u8 start_head; // 分区起始磁头号
u8 start_sector : 6; // 分区起始扇区号
u16 start_cylinder : 10; // 分区起始柱面号
u8 system; // 分区类型字节
u8 end_head; // 分区的结束磁头号
u8 end_sector : 6; // 分区结束扇区号
u16 end_cylinder : 10; // 分区结束柱面号
u32 start; // 分区起始物理扇区号 LBA
u32 count; // 分区占用的扇区数
} _packed part_entry_t;
typedef struct boot_sector_t // 主引导扇区结构
{
u8 code[446]; // 446个字节的代码
part_entry_t entry[4]; // 4个分区信息
u16 signature; // 2个字节的校验位 0x55aa
} _packed boot_sector_t;
typedef struct ide_part_t // 我们的系统使用的分区信息
{
char name[8]; // 分区名称
struct ide_disk_t *disk; // 磁盘指针
u32 system; // 分区类型
u32 start; // 分区起始物理扇区号 LBA
u32 count; // 分区占用的扇区数
} ide_part_t;
// 分区文件系统, 以下是一些常用的分区类型
// 参考 https://www.win.tue.nl/~aeb/partitions/partition_types-1.html
typedef enum PART_FS
{
PART_FS_FAT12 = 1, // FAT12
PART_FS_EXTENDED = 5, // 扩展分区
PART_FS_MINIX = 0x80, // minux
PART_FS_LINUX = 0x83, // linux
} PART_FS;
// 读分区
int ide_pio_part_read(ide_part_t *part, void *buf, u8 count, idx_t lba)
{
return ide_pio_read(part->disk, buf, count, part->start + lba);
}
// 写分区
int ide_pio_part_write(ide_part_t *part, void *buf, u8 count, idx_t lba)
{
return ide_pio_write(part->disk, buf, count, part->start + lba);
}
// 分区初始化
static void ide_part_init(ide_disk_t *disk, u16 *buf)
{
if (!disk->total_lba) // total_lba为0 ,说明磁盘不可用
return;
ide_pio_read(disk, buf, 1, 0); // 读取主引导扇区
boot_sector_t *boot = (boot_sector_t *)buf; // 初始化主引导扇区
for (size_t i = 0; i < IDE_PART_NR; i++) // 分别读取主引导扇区中的4个主分区信息
{
part_entry_t *entry = &boot->entry[i];
ide_part_t *part = &disk->parts[i];
if (!entry->count) // 如果分区的扇区数量为0,直接跳过
continue;
sprintf(part->name, "%s%d", disk->name, i + 1); // 以下打印分区信息,并设置分区的结构体
LOGK("part %s \n", part->name);
LOGK(" bootable %d\n", entry->bootable);
LOGK(" start %d\n", entry->start);
LOGK(" count %d\n", entry->count);
LOGK(" system 0x%x\n", entry->system);
part->disk = disk;
part->count = entry->count;
part->system = entry->system;
part->start = entry->start;
if (entry->system == PART_FS_EXTENDED) // 如果是扩展分区直接报错,我们的系统不支持
{
LOGK("Unsupported extended partition!!!\n");
}
}
}
在做完硬盘识别后就可以进行分区的初始化。在分区初始化中,我们就可以读取到分区信息。其中第一个分区开始的位置是2048扇区,也就是从1M的位置开始进行分区。这1M的保留空间用来被用于重要的系统结构和兼容性目的,可以存储额外的引导程序,这里不做过多介绍。
五、虚拟设备
虚拟设备是对硬件设备进行一层抽象,使得读写更加的统一,方便以后的操作。
#define NAMELEN 16 // 设备数量,最多64个
enum device_type_t // 设备类型
{
DEV_NULL, // 空设备
DEV_CHAR, // 字符设备 以char为单位进行读写,如键盘、控制台
DEV_BLOCK, // 块设备 以块为单位进行读写,如磁盘以扇区为单位读写
};
enum device_subtype_t // 设备子类型
{
DEV_CONSOLE = 1, // 控制台
DEV_KEYBOARD, // 键盘
};
typedef struct device_t
{
char name[NAMELEN]; // 设备名
int type; // 设备类型
int subtype; // 设备子类型
dev_t dev; // 设备号
dev_t parent; // 父设备号
void *ptr; // 设备指针
int (*ioctl)(void *dev, int cmd, void *args, int flags); // 设备控制
int (*read)(void *dev, void *buf, size_t count, idx_t idx, int flags); // 读设备
int (*write)(void *dev, void *buf, size_t count, idx_t idx, int flags); // 写设备
} device_t;
dev_t device_install( // 安装设备
int type, int subtype,
void *ptr, char *name, dev_t parent,
void *ioctl, void *read, void *write);
device_t *device_find(int type, idx_t idx); // 根据子类型查找设备
device_t *device_get(dev_t dev); // 根据设备号查找设备
int device_ioctl(dev_t dev, int cmd, void *args, int flags); // 控制设备
int device_read(dev_t dev, void *buf, size_t count, idx_t idx, int flags); // 读设备
int device_write(dev_t dev, void *buf, size_t count, idx_t idx, int flags); // 写设备
首先需要对设备进行初始化,即将64个设备结构数组全设置为空。安装设备从数组中获取一个空设备进行结构体的赋值。获取空设备时从1开始,数组0号就放空设备。因为控制台和键盘都属于字符设备,因此控制台的操作需要同步进行调整,例如console_write函数。这样就可以把控制台和键盘进行设备管理:
void console_init()
{
console_clear();
device_install(
DEV_CHAR, DEV_CONSOLE,
NULL, "console", 0,
NULL, NULL, console_write);
}
static u32 sys_test()
{
char ch;
device_t *device;
device = device_find(DEV_KEYBOARD, 0);
assert(device);
device_read(device->dev, &ch, 1, 0, 0);
device = device_find(DEV_CONSOLE, 0);
assert(device);
device_write(device->dev, &ch, 1, 0, 0);
return 255;
}
如上所示,我们在初始化控制台时,就可以把控制台安装到虚拟设备中。同样的键盘初始化也安装到虚拟设备,在0号系统调用就可以测试通过虚拟设备进行读写。
六、块设备请求
块设备 (如硬盘,软盘) 的读写以扇区(512B) 为单位,操作比较耗时,需要寻道,寻道时需要旋转磁头臂。所以需要一种策略来完成磁盘的访问。这个策略就是电梯算法,我们在下一篇文章再详细说明。
// 执行块设备请求
static void do_request(request_t *req)
{
switch (req->type)
{
case REQ_READ:
device_read(req->dev, req->buf, req->count, req->idx, req->flags);
break;
case REQ_WRITE:
device_write(req->dev, req->buf, req->count, req->idx, req->flags);
break;
default:
panic("req type %d unknown!!!");
break;
}
}
// 块设备请求
void device_request(dev_t dev, void *buf, u8 count, idx_t idx, int flags, u32 type)
{
device_t *device = device_get(dev);
assert(device->type = DEV_BLOCK); // 是块设备
idx_t offset = idx + device_ioctl(device->dev, DEV_CMD_SECTOR_START, 0, 0); // 获取到磁盘扇区的位置
if (device->parent) // 有父设备,例如分区的话就找到分区的磁盘,对磁盘操作
{
device = device_get(device->parent);
}
request_t *req = kmalloc(sizeof(request_t)); // 申请内存存放请求参数
req->dev = dev;
req->buf = buf;
req->count = count;
req->idx = offset;
req->flags = flags;
req->type = type;
req->task = NULL;
bool empty = list_empty(&device->request_list); // 判断列表是否为空
list_push(&device->request_list, &req->node); // 将请求压入链表
if (!empty) // 如果列表不为空,则阻塞,因为已经有请求在处理了,等待处理完成; 这块是压入前判断的是否为空
{
req->task = running_task();
task_block(req->task, NULL, TASK_BLOCKED);
}
do_request(req); // 执行请求
list_remove(&req->node);
kfree(req);
if (!list_empty(&device->request_list))
{
// 先来先服务
request_t *nextreq = element_entry(request_t, node, device->request_list.tail.prev);
assert(nextreq->task->magic == ONIX_MAGIC);
task_unblock(nextreq->task);
}
}
static u32 sys_test()
{
char ch;
device_t *device;
void *buf = (void *)alloc_kpage(1);
device = device_find(DEV_IDE_PART, 0); // 查找第一个磁盘分区
assert(device);
memset(buf, running_task()->pid, 512); // 设置buf为进程id
device_request(device->dev, buf, 1, running_task()->pid, 0, REQ_WRITE); // 将进程id写入磁盘
free_kpage((u32)buf, 1);
return 255;
}
如上为块设备请求的实现,磁盘就属于块设备。这里我们把磁盘和磁盘分区作为子设备类型安装到虚拟设备, 这里在磁盘初始化时进程完成。我们依然在0号系统调用进行测试,然后开启三个现成来调用test。
「真诚赞赏,手留余香」
 WangFuJie Blog
WangFuJie Blog
真诚赞赏,手留余香
使用微信扫描二维码完成支付
